 STP-42CI48E SEIKO EPSON
STP-42CI48E SEIKO EPSON STP-42CI48E SEIKO EPSON
ステッピングモータの仕組み
名前はよく聞くけど中身はよく知らなかったので少し勉強しました。
ステッピングモータは、その名のとおり制御信号により小刻みに作動するモータです。
プリンタの位置決め制御(ヘッド、紙送り)など幅広く使われています。
動作原理は、固定子(ステータ)の極性を外部より順次変える(制御)ことにより、回転子(ロータ)が回転する。
最近よく使われているものは、回転子に永久磁石をもちいたPM型である。巻線の方式で分けるとユニポーラ型
とバイポーラ型がある。回転させるため縦および横方向に配置された固定極の極性を順次変えることを考えると
バイポーラ型だと励磁極の印加電圧の極性を反転させる必要がある。一方、ユニポーラ型であれば励磁する極を
選択(XorX~)することにより、磁束の向きを変えることができる。
ユニポーラ型の磁束:Xを励磁すれば下向き、X~を励磁すれば上向き
回転させるための励磁シーケンス(順序)には、1相、2相、1-2相などがある。
2相方式:トルクが最も大きい(標準的)
1-2相方式:ステップ角が半分(速度も)になり、 回転が安定する
1相方式:回転は2相方式と同じだが、トルクが小さい
1:on、0:off
制御回路・ソフト
前記の内容を踏まえ、制御回路・ソフトを組んだ。
速度調整(増・減)、回転方向の設定
2相励磁方式
メインルーチンで、速度パラメータのタイマ1の割込周期を変更(決定)する。
(ステッピングモータの応動は、最大数ms程度なのでこれを上限としてタイマ1割込周期を調整)
タイマ1割込ルーチンで励磁出力した後、パターン(①-④)を正または逆方向に進める。その後、パルス(タイマ)周期
を書き換える。
回路的には、特に難しくない。CPUは2313を使用した。
PB0-3がモータ巻線のX/X~/Y/Y~の制御に対応し、トランジスタを介し励磁する。(巻線電流1相0.1A程度)
ダイオードは、巻線on→off時の逆起電力をショートしトランジスタを保護する。
モータ接続用コネクタの配線は、上下反転しても問題ないよう入替えて回路図のような配列とした。
(結果的に上下逆に差すと、回転が逆になるようになった)
今回使用したモータ仕様(プリンタの紙送り用、480円也)
STP-42CI48E SEIKO EPSON
2相ユニポーラ型
駆動電圧:5-12V(?)程度
巻線抵抗(X/X~/Y/Y~): 各46Ω程度(実測)
ステップ数:48(実動作で確認)
(概要フロー)
動作結果
このステッピングモータの最大応答時間は約7ms/パルス(約178rpm)、これ以上にすると振動するだけで回転しなくなる。
この範囲であれば、急に正・逆を反転させても問題なく移行できる。
このソフトでの最低速度は、約0.98s/パルス(約1.28rpm)
一般的に言われているように、低速(停止)時のトルクは大きく、高回転時は小さいことが確認できた。
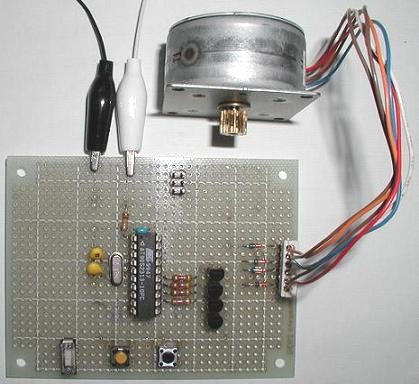
基板上の配列は、ほぼ上記回路図に合っている。ただ、回路図PBピンのならびが実物と逆のため
それに伴い、モータ接続ピンの配置が上下逆となっている。(実物:上が橙、下が赤)
機能追加
1-2相、1相励磁方式追加、設定はPD2/3で行う