AVRϲ�݂��g�p�����Ȉ��ި���قc�y�E�c�f�̐���
�z�[���y�[�W�ɖ߂�
�@�̏�v�Z
�i�f�B�W�^�������[�̍\���Ɠ��쌴���ɂ��āj
�P�@�͂��߂�
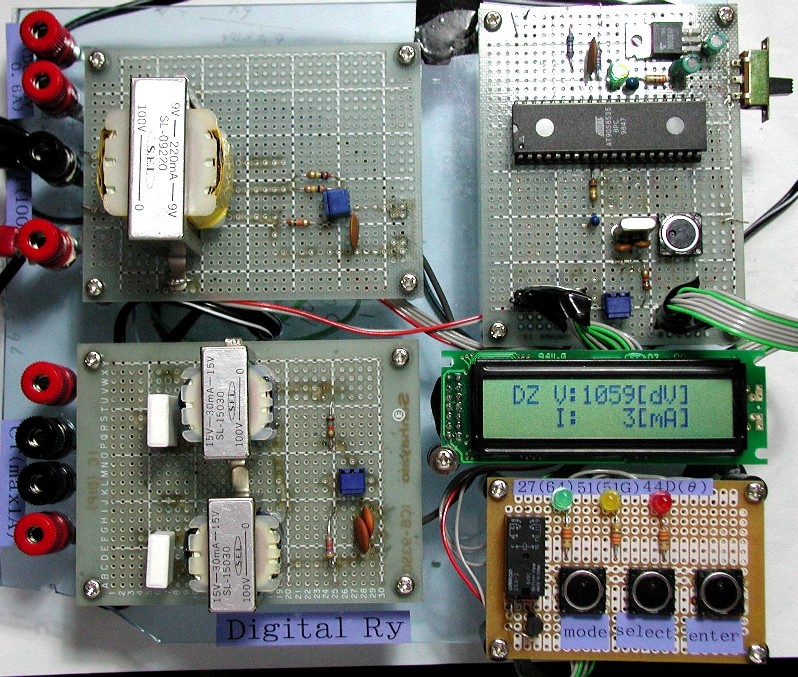
�@�@�@����̓f�B�W�^�������[�i�ی�p�d���u�j�̍\���Ɠ��쌴���ɂ��ĕ����A�`�u�qϲ�݂��g���ĊȈՁi��������j
�ȃf�W�^�������[�i�ȈՂc�y�E�c�f�j�삵���̂ŁA���̊T�v��������܂��B
�@�@�f�W�^�������[�̋��ނƂ��Ă����p�ł���Ǝv���܂��B
�@�@�@�@���ی�p�d���u�F�d�C��H�ُ̈팟�o���ی삷�邽�߂̑��u
�@�@�@�@�@�@DZ�F�����p�d��ADG:�n�������p�d��
�Q�@�ȈՃf�W�^���q���̎d�l
|
���@�@�� |
�ȈՃf�W�^���q�� |
|
�b�o�t |
�W�ޯĂq�h�r�b�@Atmel�@AT90S8535 �W�l�g���@�P��CPU |
|
�A�i���O���͂b�g |
�Q�����i�P���u�E�h�j |
|
�A�i���O���͎d�l �m���S�n |
�o�s�F��i40V(Full102.4V) �@�@�@�m0.06VA at 40V�n �b�s�F��i1.024A(Full 1.024A) �@�@�@�m0.43VA at
1A�n |
|
�A�i���O�t�B���^ |
�P�i�k�o�e |
|
�`�^�c�ϊ��� |
�P�O�ޯ��iCPU�����j ����\�@�P�O�Q�S |
|
�����ݸގ��g�� |
�V�Q�O�g���i30�K�j |
|
�f�W�^���t�B���^ |
180�K�����t�B���^ |
|
����E����\�� |
�k�b�c�F����A�u�E�h�\�� �k�d�c�F�P�̓���\�� �r�v�@�F���[�h�ݒ�A���� �c���F����o�͂P�ړ_ |
|
�\�t�g�E�F�A |
�A�Z���u���i�n�r���j |
|
�d�� |
�P��d���@�{�U�u �i�`�b�������{���艻��H�j |
|
�q������ |
�c�y�E�c�f�̂Q���[�h�ؑ� �i�P���q���A�����͐v�l�j �c�y�@�T�P�F0.1-0.2-0.3-0.5A �@�@�@�Q�V�F26-28-80-32V �@�@�S�S�c�F60-80-100-120�� �@�@�@�@�@�@��60�K �c�f�@51G�F30-50-70-90mA �@�@�@�U�S�F8-9-10-11V �@�@�@�@�ƁF�i�R�O�K�Œ� |
|
���̑� |
�u�C�h�펞�\���@�\ �J�����ԁ@��R�J�� |
�R�@���u�T�v
�@�i�P�j�n�[�h�E�F�A�u���b�N�}
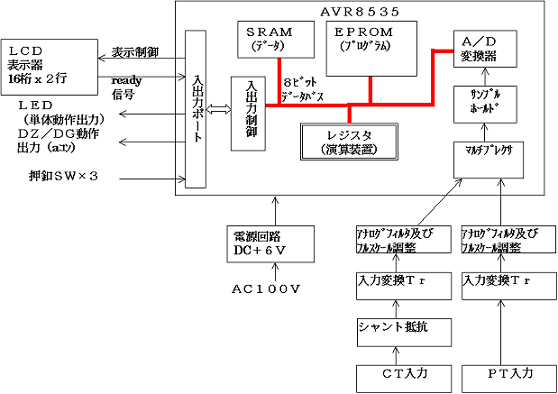
�@�@�������ΰ��މ�H�̎��@�Ƃ̑���
�@�@�@�@�ȈՃf�W�^�������[�i��j�A���@�f�W�^�������[�i���j
�@�@�@�@�@�����ΰ��މ�H�i���@�j�́A�e�b���������ް����捞�ƂƂ��ɁA�`�^�c�ϊ����s�����Ա�۸ޒl���
�@�@�@�@�����邽�߂̂��̂ł���B�ȈՃf�W�^�������[�̻����ΰ��މ�H�́A�����ڸ��i���͐ؑ֊�j�̌�
�@�@�@�@�ɂ���A�S�b�����ʂł��邽�ߊe�b�����������ݸނ��ł��Ȃ��B�i�b���Ԃ̂���̕���K�v�j
�@�i�Q�j��H�}
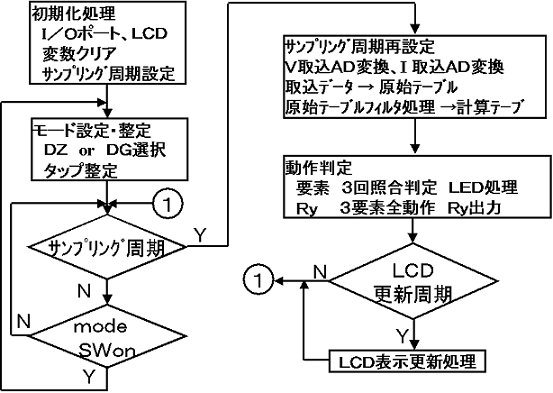
�i�R�j�\�t�g�E�F�A�t���[�}
�@
�S�@���͕��ڍ�
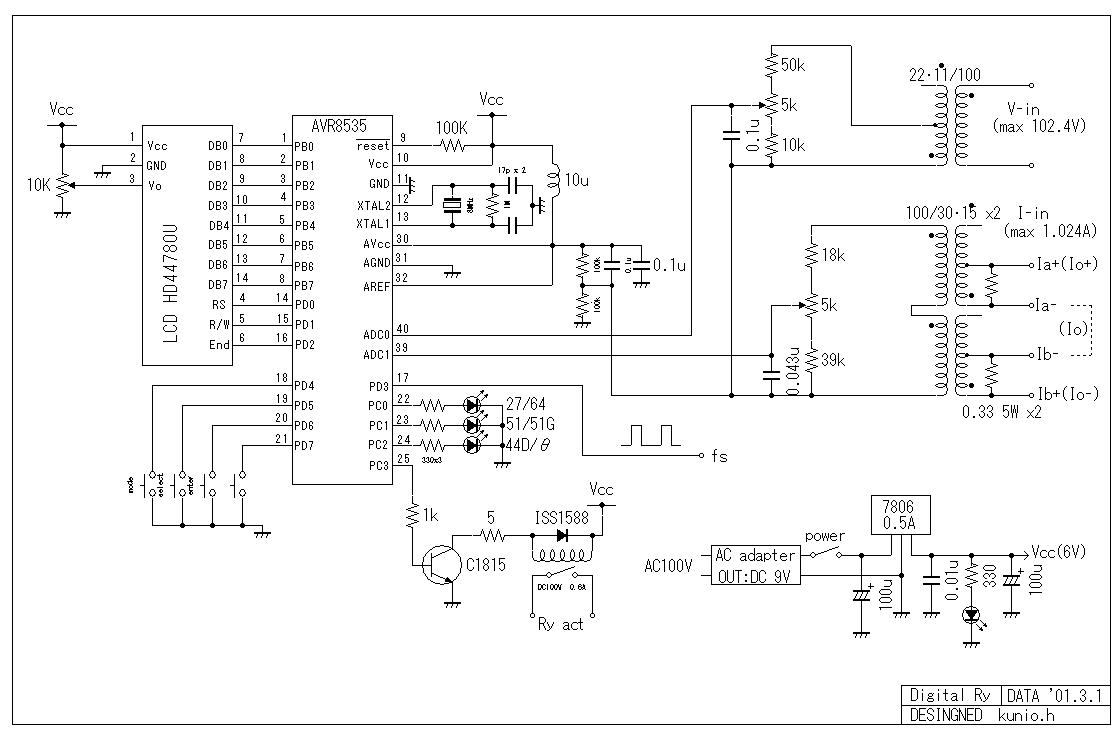
�@�i�P�j�A�i���O����
�@�@�@�`�^�c�ϊ��̓��͓d���́A��d���i�c�b�U�u�u����5.92V�v�j�̂Ƃ��ٽ��فi�P�O�Q�S�ޯāj�ɂȂ��
�@�@�ŁA�o�s�i�b�s�j���͒l������ɍ��킹��悤�A�ϊ��s���y�ѕ�����R�ŃX�P�[���������s���B
�@ 
�@�i�Q�j�t�B���^����
�@�@�@�f�W�^�������[�̉��Z�A���S���Y���́A�n�����g������{�g���g���݂̂ł��邱�Ƃ�O��ɂ��ď���
�@�@����̂ŁA����ȊO�̎��g���i�����g�j���d�Ă���Ɖ��Z�덷�����������씻�肪�s���Ȃ��B
�@�@�@���̂��߁A���͐M���̍����g��������������t�B���^�������K�v�ɂȂ�A�A�i���O�ƃf�W�^���̃t�B
���^�ŏ������Ă���B
�@�@�@�A�i���O�t�B���^�F�T���v�����O���g���̂P�^�Q�ȏ�̎��g�������i�ጸ�j�A�f�W�^���t�B���^�ł͌�
���I�ɏ����ł��Ȃ�����
�@�@�@�f�W�^���t�B���^�F����������э����g
�@�i�R�j�A�i���O�t�B���^��H
 �@
�@
�@�@�u�����u���^�i�P�{��CR�j�@�@�Q�C����1/��Q�ƂȂ���g���@����=�P�^�i�Q��CR�j
�����ݸގ��g��720Hz��1/2�i360Hz�j�ȏ�������������̂ŁA������360�g���̔������x�ɂb�q�̒l���
�肷��B�@�o�s��H�̓����q�l�́A��X.5�����ł���̂łb��0.1���e�Ƃ����B
�@�@������=
1/�i�Q�~9.5�~0.1�~10-3�j���P68Hz�A60Hz�̈ʑ��@�@��v=������-1 2�~60�~9.5�~0.1�~10-3 ��20��
���g���ɑ���Q�C���E�ʑ������̓O���t�̂Ƃ���ŁA�����ݸގ��g����1/2�ȏ�̎��g���̃Q�C����
�@�S0%���x�ȉ��ɂȂ�B
�@�@�@CT�́APT
A/D�ϊ����ԁi��X�����m��2���n�j���x��Ļ����ݸނ���̂ŁA���̕�PT���ʑ��x����A
�@����������BCT��H�̓���R�l�́A��W�D�W�����ł����C�l��0.1���e�Ƃ����
�@�ƂȂ�A�قړ��ʑ��Ż����ݸނł���B
�i���ۂɂ������ݸގ��ԍ���6���APT�ECT���ʑ�������1���ŁACT���x5�����x�ƂȂ����j
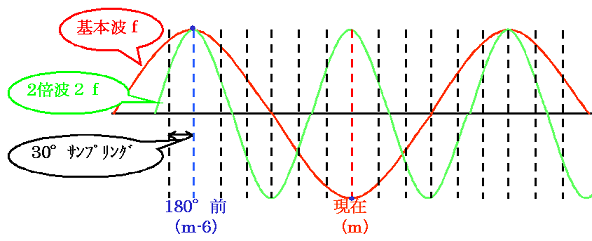
�@�i�S�j�����ݸގ��g��
�@�@�@�@�����ݸގ��g���i�����j�́A���ׂ����ق������̔g�`�ɋ߂��Ȃ邪�A�����ݸނ̒藝�A�ܕԂ��덷�A
CPU�������Ԃ≉�Z�Ɏg�p����d�C�p�A�����g�̏��������l�����Č��߂�B
� Ų��Ă̻����ݸޒ藝
�@���g���ш悪��Hz�ɐ�������Ă���g�`�́A�Q���̎��g���Ż����ݸނ���A���̻����ݸ�
�l����A���̔g�`����ӓI�ɍČ��ł���B�i60Hz�̏ꍇ120Hz�ȏ�̎��g���Ż����ݸނ���
�Ό��̔g�`���Č��ł���j
� �ܕԂ��덷
�@��L�ɂ����āA���g���ш悪��������Ă��Ȃ��Ɗ�{�g���̐����{�̎��g���M���Ɗ�{�g��
�@��ʂł����A�����ݸގ��g��fs�𒆐S�ɐܕԂ��������g���Ō덷����B
�i���̂��߁A�����ݸނ̑O�����Ƃ��ı�۸�̨���ɂ��Afs/2�ȉ��ƂȂ�悤�ɑш搧�������Ă���B�j
�@�@�@�@�@�����ݸޒl�́A��{�g�ƂR�{�g�ƈꏏ�ł��邽�ߋ�ʂł��Ȃ��B
� ���Z�Ɏg�p����d�C�p
�@�U�����Z90���A�ʑ�����60���Ȃǂ������g����B
�ȏ�̓_�ȂǍl�����āA��ʓI�ɂ�30�������ݸ��������B�i90�������ݸނ̏ꍇ������j
����̊ȈՃ����[���R�O�������ݸނƂ��������ACPU�������ԏ���Ȃ����i�����ݸގ���
���ԓ��ɏ������[�܂邩�j���O���������B
�E�d�C�p�R�O���i720Hz�A��1.38ms�j�Ȃ��ɏ����ł��閽�ߐ�
�ECPU���g���i�����\�́j �WMH���i�P�b�ԂɂW�S���T�C�N���̏����A1����:125ns�j�@
1�̖��߂ɂ�����T�C�N�����F1����4���ٕ��ςQ����(250ns)
�@�@�@�E�`�c�ϊ����ԁ@0.4ms
�@�@�@�����s�\���ߐ�
�i1.38-0.4�j�~10-3�^(250�~10-9)=3920����
�@�@�@�����ݸޏ����E���Z�����E�\���������܂߂āA���ߐ���2000���ߒ��x�Ȃ̂Ŗ��Ȃ��A�R�O��
�����ݸނƂ����B
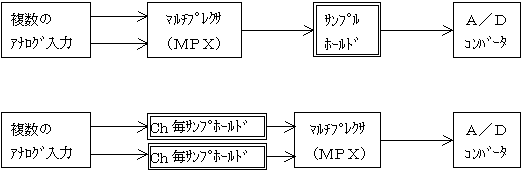
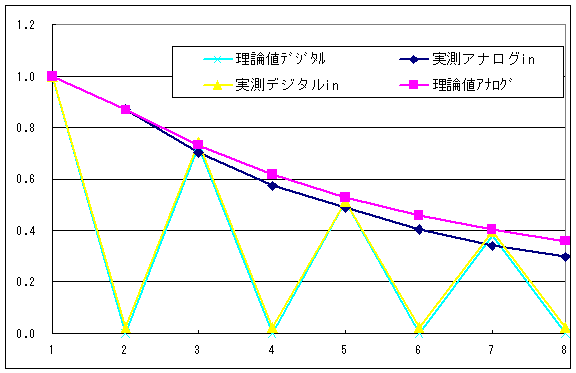
�@�i�T�j�f�W�^��̨������
�@�@�@�@�f�W�^�������[�̏ꍇ�ܕԂ��덷�̖�肩��A��۸�̨���ƕ��p����̂ŏ������ȒP�Ȕ�^̨
�����p�����Ă���B��`̨���́A���݂̻����ݸޒl�Ɏ��O�̻����ݸޒl��̨����ޯ��i���Z
�܂��͉��Z�j���邱�Ƃɂ��A����̍����g�܂��͒����������S�ɏ������邱�Ƃ��ł���B
�@�@�@�f�W�^��̨���������Ə��������@(�R�O�������ݸނ̏ꍇ)
|
������ |
�������� |
|
�@Y��Xm�{Xm-�P |
�R�C�X�E�E�E |
|
�AY��Xm-Xm-�Q |
DC�C�U�C�P�Q�E�E |
|
�BY��Xm-Xm-�R |
DC�C�S�C�W�E�E�E |
|
�CY��Xm-Xm-�S |
DC�C�R�C�U�E�E�E |
|
�DY��Xm-Xm-�U |
DC�C�Q,�S�E�E�E |
�@�@
��ʂɒ���������ы������g�������ł���D�����p���Ă���B�U�����ݸ�(�P�W�O��)�O�̒l����
�@�Z����B�i��{�g�́A�Q�{�̐U���l��������j
�@�@
�@�@�i�T�j���̓f�[�^�̗���
�S�@�����[���Z�A���S���Y��
�@�@���@�ň�ʓI�g���Ă��鉉�Z��@��p�����B
�i�P�j��{�A���S���Y��
�E�U���l���Z
�U�����@�@�@�b�u�b�Q���u���Q�{�u���|�R�Q�@
�@�@�@�@�@�@�@�@�@�@����l��90�����ꂽ�l�̓�悪�A��Βl�̓��ɂƂȂ�B
�����I�Ɍ덷���Ȃ��B���������ʂ͓ƂȂ�B
�E�ʑ������Z�i�Q�̃x�N�g�����X�O���ȓ�����j
�@�@�@���p�Q�T���v���@
�@�@�@�@�@�@�@�@�@�b�u�b�E�b�h�b�������Ɓ��u���E�h���{�u���|�R�E�h���|�R����
�@�@�@�@�@�@�@�@�@�@�����O�E�E�E�X�O���ȓ��A�@�����O�E�E�E�X�O���ȏ�
�@�@�@�@�@�@�@�@�@��Z�����Ȃ̂ʼn��Z���ԏ�L��
�@�@�@�E�ʑ����Z
�@�@�@�@�R�O���̔{���̒x��i�݂́A�ȑO�̻����ݸރf�[�^�ŊȒP�ɕ\���ł���B
�@�@�@�@�@��F�u���̂R�O���x��E�E�E�u���|�P�A�u���̂U�O���i�݁E�E�E�|�u���\�S
�@�@�@�@�@�i���̑��̈ʑ����A�Q�̃x�N�g���a�ŕ\���j
�i�Q�j�����[�v�f
�@�@�@�E�Q�V�A�U�S�A�T�P�C�T�PG�i�傫���̂ݔ���j
�@�@�@�@�b�u�b���i�܂��́��j�utap�@���@�u���Q�{�u���|�R�Q�@���i�܂��́��j�utap�Q
�i����l�͓��l�ŗ^����j
�@�@�@�E�Ɓi�c�f�j
�@�@�@�@�c�f�̈ʑ������i�ő労�x�p�j�́A�z�d���i�U�O���E���d���i�P�O�����W���ł���B
�@�@�@�@����ǂ���ɂ��Ή��ł��A���Z���e�ՂȐi�R�O���Ƃ����B
�@�@�@�@�@�u���E�h���{�u���|�R�E�h���|�R�@�i��{���j����d�����R�O���x�炷�B
�@�@�@�@�@�Ɣ��莮�@�u���E�h���|�P�{�u���|�R�E�h���|�S����
�@�@�@�@�@�@�@�@�@�@�u��h�ʑ��@�����O�E�E�i�P�Q�O���`�@�x�U�O���i����j
�����O�E�E�x�U�O���`�@�i�P�Q�O���i�s����j
�E�S�S�c�i���[�����j
�@�����y�h�|�u�iZ:����l�A�h:�h0��60���i�j�@�����u
�@�Ƃ����Ƃ��A2�̃x�N�g��a,b�ʑ����Ƃ�90���ȏォ�ȉ����ɂ�蓮�씻�肪�ł���B
�@������A��{���ɓ��Ă͂߂��
�@ �u���iZ�h���{�Q�|�u���j�{�u���|�R�iZ�h���|�P�\�u���|�R�j����
�ƂȂ�B�Ƃ���ŁA���[�����͎��ߒ[�̏�iV���O�j�ɂ����Ă��O���̏Ⴉ����̏Ⴉ�����ɂ߂�K�v������B
�i������郁�������ʋ@�\�j��L�Aa,b�̃x�N�g���̓��씻��ɂ����āAb�̃x�N�g���͑傫���̏��͈Ӗ���
�Ȃ��A�����̏��̂ݕK�v�ɂȂ�B����Ă������x�N�g�����A�̏�O�̏��ɒu�����邱�Ƃɂ��e�ՂɃ�
�������ʂ�������B���x�N�g�����A�ʏ�2���فi24�����ݸށj�O�̏���p�����Z���邱�Ƃɂ���āA����
�����ʂ��������Ă���B������A�O���ɓK�p����������Ǝ��̂悤�ɂȂ�B
�@�@Z(�u���|27�h���|�P�\�u���|24�h���|�S)�|�i�u���u���|24�{�u���|�R�u���|27�j�|������
�@�@�@����0�@����A�����O�@�s����A���͓d���d���l���ɒ[�ɏ������Ƃ��̕s���蓮��h�~
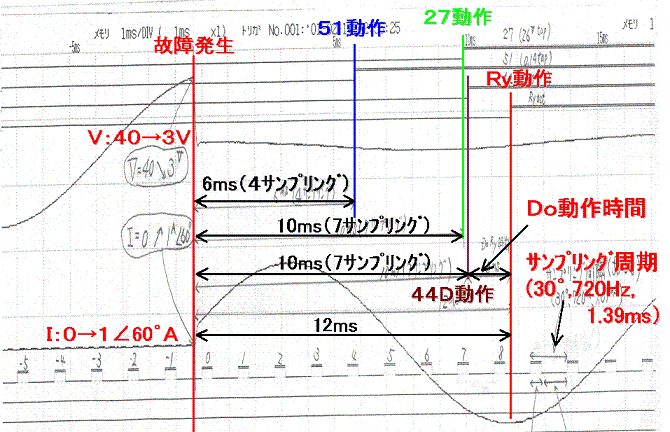
�i�R�j���씻��
�@�@�@�����[�͐M��������i�T�[�W��m�C�Y���ɂ���۸ރf�[�^�̃G���[�r���j��A�s����ȓ���h�~�i�`
���^�����O�h�~�j���邽�߁A������̌��ʂ���v�����Ƃ�����Ɣ��肷��ϕ��ƍ����s���Ă���B
�܂��A����ɂ�蕜�A���Ƀq�X�e���V�X���������Ă���B
�@�@
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�i�_���ͻ����ݸށA�E�͉��Z���ʓ��씻��j
�i�R�j�c�y�̂b�s��H�ڑ�
�@�@�@����̂q���͂o�s�E�b�s�Ƃ��P���ł��邽�߁A�c�y�̏ꍇ�ڑ������@�Ƃ��ƂȂ�A�b�s���Ő��d���̍��d����
���K�v�����邽�߁A�b�s�̓������ɂ��Ȃ���Ȃ�Ȃ��B�i���@�ł͐��d���̍����d�������͂ƂȂ��
���A�Q���̐��d������������g�[�^���b�s���t���j
�T�@���쎎��
�@�@�i�P�jPTCT����
�@�@�@�@�@�o�s�@�S�O�u�A�b�s1A�������́@�@�`�^�c�ϊ��O�ʑ����@�@�h�i�ݖ�P�x
|
�iA/D�ϊ����Ԃɂ��ʑ����h�x��U�x�j |
|||
|
�@���S���� |
|
|
|
|
�@ |
�u�iV�j |
�h(mA) |
���S(VA) |
|
�o�s��H |
40.00 |
1.4 |
0.056 |
|
�b�s��H |
0.43 |
1000 |
0.430 |
�@�@�i�Q�jPT���g���į���j����
�@�@�@�@�@�@�@�@�@�@�@�@�@�i�Q�C����60Hz���P�Ƃ����l�j
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@���g���i�~�U�OHz�j
�i�R�jRy�P�̎���
|
�c�f |
|
|
|
|
|
|
|
|
�U�S |
�s����(V) |
8 |
9 |
10 |
11 |
|
|
|
����l |
8.38 |
9.39 |
10.39 |
11.37 |
|
|
|
|
�덷 |
4.75% |
4.33% |
3.90% |
3.36% |
|
|
|
|
�T�P�f |
�s����(mA) |
30 |
50 |
70 |
90 |
|
|
|
����l |
33 |
53 |
73 |
93 |
|
|
|
|
�덷 |
10.00% |
6.00% |
4.29% |
3.33% |
|
|
|
|
�ʑ����� |
�h��(mA) |
10 |
30 |
50 |
100 |
500 |
�@ |
|
�u���F�W�u |
-99.3 |
-109.9 |
-112.0 |
-113.6 |
-114.8 |
�@ |
|
|
57.9 |
63.0 |
63.7 |
64.2 |
64.1 |
�@ |
||
|
�ő����x�p |
-20.7 |
-23.5 |
-24.2 |
-24.7 |
-25.4 |
�@ |
|
|
�u���F40�u |
-100.6 |
- |
-111.4 |
- |
-113.6 |
�@ |
|
|
62.0 |
- |
64.9 |
- |
65.4 |
�@ |
||
|
�ő����x�p |
-19.3 |
- |
-23.3 |
- |
-24.1 |
�@ |
|
|
�������� |
���� |
�������F�W�u�A30mA�@�����@�O���������~1.5 |
|
|
|||
|
���� |
��:0 |
20ms |
��:-30 |
20ms |
|
|
|
|
���� |
�������F11�u�A90mA�@�����@�O���������~1.5 |
|
|
||||
| ���� |
��:0 |
19ms |
��:-30 |
20ms |
|
|
|
|
�c�y |
|
|
|
|
|
|
|
|
�Q�V |
�s����(V) |
26 |
28 |
30 |
32 |
|
|
|
����l |
26.11 |
28.09 |
30.08 |
32.06 |
|
|
|
|
�덷 |
0.42% |
0.32% |
0.27% |
0.19% |
|
|
|
|
�T�P |
�s����(mA) |
100 |
200 |
300 |
400 |
|
|
|
����l |
103 |
202 |
301 |
401 |
|
|
|
|
�덷 |
3.00% |
1.00% |
0.33% |
0.25% |
|
|
|
|
�S�S�c |
�s����(��) |
60 |
80 |
100 |
120 |
60���A�S�O�u |
60��,OV,1A |
|
60�K,0.2A |
11.92 |
15.94 |
19.93 |
23.91 |
0.673 |
�s�����m�F |
|
|
59.60 |
79.70 |
99.65 |
119.55 |
59.44 |
�� |
||
|
90�K,0.2A |
10.88 |
14.83 |
18.52 |
22.15 |
|
|
|
|
54.40 |
74.15 |
92.60 |
110.75 |
|
|
||
|
30�K,0.2A |
9.75 |
12.84 |
16.05 |
19.34 |
|
|
|
|
48.75 |
64.20 |
80.25 |
96.70 |
|
|
||
|
0�K,0.2A |
5.09 |
5.75 |
7.52 |
9.09 |
|
|
|
|
25.45 |
28.75 |
37.60 |
45.45 |
|
|
||
|
�ő労�x�p |
65.4 |
67.1 |
67.1 |
66.7 |
|
|
|
|
�������� |
���� |
�@�������F26�u�A100mA�A60���i�����80%�j |
|
|
|||
|
|
|
||||||
|
���� |
22ms |
|
|
||||
| ���� |
�@�������F26�u�A100mA�A60���i�����Z�̏��j |
|
|
||||
|
|
|
||||||
|
���� |
14ms |
|
|
||||
|
�s���� |
���� |
�@�������F26�u�A100mA�A60���i������120%�j |
�s�����@�� |
|
|||
|
|
|||||||
| ���� |
�@�������F26�u�A100mA�A60���i�����120%�j |
�s�����@�� |
|
||||
|
|
|||||||
|
���� |
�@�������F26�u�A100mA�A60���i������ߒZ�̏�j |
�s�����@�� | |||||
�@�@�@�@�@�@DG�ʑ������@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@DZ-D����
�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@�@DZ����^�C�~���O
�@�@�@�@�@�@�@�@�@�@�@�ȁ@��
�Q�l����
�E�O�H�d�@�f�B�W�^�������[�E�G���W�j�A�����O�i�O�H�d�@�����[�����e�L�X�g�j
�E�d�C���������@��41���@��4���@�u�f�W�^�������[�v�@S61.1
�EAtmel�@8bit�@RISC�@Data�@Sheets�iAT90S8535�j